
ໂຄງການນີ້ອະທິບາຍວິທີການ motor DC ສາມາດໄດ້ຮັບການເຄື່ອນໄຫວໃນທິດທາງໄປຫນ້າຫຼືປີ້ນກັບການນໍາໃຊ້ໂທລະພາບຫຼື DVD ການຄວບຄຸມໄລຍະໄກ.ເປົ້າຫມາຍແມ່ນການກໍ່ສ້າງໄດເວີມໍເຕີ bi-directional ງ່າຍດາຍທີ່ນໍາໃຊ້ການຝຶກອົບຮົມກໍາມະຈອນ infrared modulated (IR) 38kHz ສໍາລັບຈຸດປະສົງໂດຍບໍ່ມີການນໍາໃຊ້ microcontroller ຫຼືໂຄງການໃດໆ.
ຕົ້ນແບບຂອງຜູ້ຂຽນແມ່ນສະແດງຢູ່ໃນຮູບທີ 1.

ວົງຈອນແລະການເຮັດວຽກ
ແຜນວາດວົງຈອນຂອງໂຄງການແມ່ນສະແດງຢູ່ໃນຮູບ 2. ມັນຖືກສ້າງຂຶ້ນປະມານໂມດູນ IR receiver TSOP1738 (IRRX1), decade counter 4017B (IC2), motor driver L293D (IC3), PNP transistor BC557 (T1), two BC547 NPN transistors ( T2 ແລະ T3), 5V ຄວບຄຸມການສະຫນອງພະລັງງານ (IC1), ແລະຫມໍ້ໄຟ 9V.
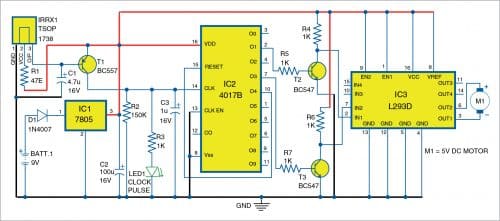
ຫມໍ້ໄຟ 9V ແມ່ນເຊື່ອມຕໍ່ຜ່ານ diode D1 ກັບເຄື່ອງຄວບຄຸມແຮງດັນ 7805 ເພື່ອສ້າງ 5V DC ທີ່ຕ້ອງການສໍາລັບໂຄງການ.Capacitor C2 (100µF, 16V) ຖືກນໍາໃຊ້ສໍາລັບການປະຕິເສດ ripple.
ພາຍໃຕ້ສະພາບປົກກະຕິ, ຂາອອກ 3 ຂອງໂມດູນ IR IRRX1 ແມ່ນມີເຫດຜົນສູງ, ຊຶ່ງຫມາຍຄວາມວ່າ transistor T1 ທີ່ເຊື່ອມຕໍ່ກັບມັນຖືກຕັດອອກແລະສະນັ້ນ terminal ຂອງຕົວເກັບລວບລວມຂອງມັນຢູ່ໃນເຫດຜົນຕ່ໍາ.ຜູ້ເກັບ T1 ຂັບລົດກໍາມະຈອນຂອງໂມງຂອງທົດສະວັດ counter IC2.
ເມື່ອຊີ້ຣີໂໝດໄປຫາໂມດູນ IR ແລະກົດປຸ່ມໃດນຶ່ງ, ໂມດູນຈະໄດ້ຮັບ IR pulses 38kHz ຈາກຣີໂມດຄວບຄຸມ.ກໍາມະຈອນເຫຼົ່ານີ້ຖືກປີ້ນກັບຕົວເກັບຂອງ T1 ແລະມອບໃຫ້ກັບເຂັມໂມງປ້ອນຂໍ້ມູນ 14 ຂອງ IC2 counter ທົດສະວັດ.
ກຳມະຈອນ IR ທີ່ມາຮອດຈະເພີ່ມການນັບທົດສະວັດໃນອັດຕາດຽວກັນ (38kHz) ແຕ່ເນື່ອງຈາກມີຕົວກອງ RC (R2=150k ແລະ C3=1µF) ຢູ່ທີ່ເຂັມໂມງປ້ອນເຂົ້າ 14 ຂອງ IC2, ລົດໄຟກຳມະຈອນປະກົດວ່າເປັນກຳມະຈອນດຽວຢູ່ທີ່. ເຄົາເຕີ.ດັ່ງນັ້ນ, ເມື່ອກົດປຸ່ມແຕ່ລະຄັ້ງ, ຕົວຕ້ານທານກ້າວຫນ້າໂດຍການນັບຄັ້ງດຽວເທົ່ານັ້ນ.
ເມື່ອກະແຈຂອງຣີໂມດຖືກປ່ອຍອອກມາ, ຕົວເກັບປະຈຸ C3 ຈະໄຫຼຜ່ານຕົວຕ້ານທານ R2 ແລະສາຍໂມງຈະກາຍເປັນສູນ.ດັ່ງນັ້ນທຸກໆຄັ້ງທີ່ຜູ້ໃຊ້ກົດແລະປ່ອຍກະແຈໃນຣີໂມດ, ເຄົາເຕີຈະໄດ້ຮັບກໍາມະຈອນດຽວຢູ່ທີ່ໂມງເຂົ້າຂອງມັນແລະ LED1 ສະຫວ່າງເພື່ອຢືນຢັນວ່າກໍາມະຈອນໄດ້ຮັບ.
ໃນລະຫວ່າງການປະຕິບັດງານສາມາດມີຫ້າຄວາມເປັນໄປໄດ້:
ກໍລະນີ 1
ເມື່ອກົດປຸ່ມຂອງທາງໄກຖືກກົດ, ກໍາມະຈອນທໍາອິດມາຮອດແລະຜົນຜະລິດ O0 ຂອງຕົວນັບທົດສະວັດ (IC2) ຈະສູງໃນຂະນະທີ່ pins O1 ຫາ O9 ຕ່ໍາ, ຊຶ່ງຫມາຍຄວາມວ່າ transistors T2 ແລະ T3 ຢູ່ໃນສະພາບຕັດອອກ.ຕົວເກັບລວບລວມຂອງທັງສອງ transistors ໄດ້ຖືກດຶງໄປສູ່ສະພາບສູງໂດຍຕົວຕ້ານທານ 1-kilo-ohm (R4 ແລະ R6), ດັ່ງນັ້ນທັງສອງ terminals input IN1 ແລະ IN2 ຂອງ motor driver L293D (IC3) ກາຍເປັນສູງ.ໃນຂັ້ນຕອນນີ້, ມໍເຕີຢູ່ໃນສະພາບ.
ກໍລະນີ 2
ເມື່ອກົດປຸ່ມອີກເທື່ອຫນຶ່ງ, ກໍາມະຈອນທີສອງທີ່ມາຮອດເສັ້ນ CLK ຈະເພີ່ມຕົວນັບໂດຍຫນຶ່ງ.ນັ້ນແມ່ນ, ເມື່ອກໍາມະຈອນທີສອງມາຮອດ, ຜົນຜະລິດ O1 ຂອງ IC2 ຈະສູງ, ໃນຂະນະທີ່ຜົນຜະລິດທີ່ຍັງເຫຼືອແມ່ນຕໍ່າ.ດັ່ງນັ້ນ, transistor T2 conducts ແລະ T3 ຖືກຕັດອອກ.ຊຶ່ງຫມາຍຄວາມວ່າແຮງດັນທີ່ຕົວເກັບລວບລວມ T2 ຕໍ່າລົງ (IN1 ຂອງ IC3) ແລະແຮງດັນທີ່ຕົວເກັບລວບລວມ T3 ກາຍເປັນສູງ (IN2 ຂອງ IC3) ແລະວັດສະດຸປ້ອນ IN1 ແລະ IN2 ຂອງມໍເຕີໄດເວີ IC3 ກາຍເປັນ 0 ແລະ 1, ຕາມລໍາດັບ.ໃນກໍລະນີດັ່ງກ່າວນີ້, ມໍເຕີ rotates ໃນທິດທາງຂ້າງຫນ້າ.
ກໍລະນີ 3
ເມື່ອກົດປຸ່ມອີກເທື່ອຫນຶ່ງ, ກໍາມະຈອນທີສາມທີ່ມາຮອດເສັ້ນ CLK ຈະເພີ່ມຕົວນັບອີກຄັ້ງ.ດັ່ງນັ້ນຜົນຜະລິດ O2 ຂອງ IC2 ໄປສູງ.ເນື່ອງຈາກບໍ່ມີຫຍັງເຊື່ອມຕໍ່ກັບ O2 pin ແລະ pins ຜົນຜະລິດ O1 ແລະ O3 ແມ່ນຕ່ໍາ, ດັ່ງນັ້ນທັງສອງ transistors T2 ແລະ T3 ໄປສູ່ສະຖານະຕັດ.
ສະຖານີເກັບລວບລວມຂອງທັງສອງ transistors ໄດ້ຖືກດຶງໄປສູ່ສະພາບສູງໂດຍຕົວຕ້ານທານ 1-klo-ohm R4 ແລະ R6, ຊຶ່ງຫມາຍຄວາມວ່າ terminals input IN1 ແລະ IN2 ຂອງ IC3 ກາຍເປັນສູງ.ໃນຂັ້ນຕອນນີ້, ມໍເຕີແມ່ນອີກເທື່ອຫນຶ່ງຢູ່ໃນສະພາບ.
ກໍລະນີ 4
ເມື່ອກົດຖືກກົດອີກຄັ້ງໜຶ່ງ, ກຳມະຈອນທີສີ່ທີ່ມາຮອດເສັ້ນ CLK ຈະເພີ່ມຕົວນັບເປັນເທື່ອທີສີ່.ໃນປັດຈຸບັນຜົນຜະລິດ O3 ຂອງ IC2 ໄປສູງ, ໃນຂະນະທີ່ຜົນຜະລິດທີ່ຍັງເຫຼືອແມ່ນຕໍ່າ, ດັ່ງນັ້ນ transistor T3 ດໍາເນີນການ.ຊຶ່ງຫມາຍຄວາມວ່າແຮງດັນທີ່ຕົວເກັບລວບລວມ T2 ກາຍເປັນສູງ (IN1 ຂອງ IC3) ແລະແຮງດັນທີ່ຕົວເກັບລວບລວມຂອງ T3 ກາຍເປັນຕ່ໍາ (IN2 ຂອງ IC3).ດັ່ງນັ້ນ, ວັດສະດຸປ້ອນ IN1 ແລະ IN2 ຂອງ IC3 ແມ່ນຢູ່ໃນລະດັບ 1 ແລະ 0, ຕາມລໍາດັບ.ໃນສະພາບການນີ້, ມໍເຕີ rotates ໃນທິດທາງປີ້ນກັບກັນ.
ກໍລະນີ 5
ເມື່ອກະແຈຖືກກົດເປັນເທື່ອທີຫ້າ, ກຳມະຈອນທີຫ້າທີ່ມາຮອດເສັ້ນ CLK ຈະເພີ່ມຕົວນັບອີກຄັ້ງໜຶ່ງ.ເນື່ອງຈາກ O4 (pin 10 ຂອງ IC2) ຖືກສາຍເພື່ອປັບປ່ຽນຂາເຂົ້າ 15 ຂອງ IC2, ການກົດເປັນເທື່ອທີ 5 ເຮັດໃຫ້ IC counter ທົດສະວັດກັບຄືນສູ່ສະພາບທີ່ເປີດ-ເປີດຄືນໃໝ່ດ້ວຍ O0 ສູງ.
ດັ່ງນັ້ນ, ວົງຈອນເຮັດວຽກເປັນໄດເວີມໍເຕີສອງທິດທາງທີ່ຄວບຄຸມດ້ວຍການຄວບຄຸມໄລຍະໄກ infrared.
ການກໍ່ສ້າງແລະການທົດສອບ
ວົງຈອນສາມາດປະກອບໃສ່ Veroboard ຫຼື PCB ເຊິ່ງຮູບແບບຂະຫນາດຕົວຈິງແມ່ນສະແດງຢູ່ໃນຮູບທີ 3. ຮູບແບບອົງປະກອບສໍາລັບ PCB ແມ່ນສະແດງຢູ່ໃນຮູບທີ 4.
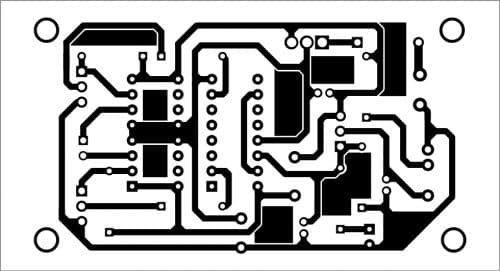
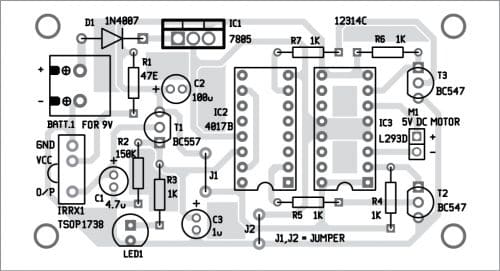
ດາວໂຫລດ PCB ແລະຮູບແບບອົງປະກອບ PDFs:ກົດບ່ອນນີ້
ຫຼັງຈາກປະກອບວົງຈອນ, ເຊື່ອມຕໍ່ຫມໍ້ໄຟ 9V ຜ່ານ BATT.1.ອ້າງອີງຕາຕະລາງຄວາມຈິງ (ຕາຕະລາງ 1) ສໍາລັບການປະຕິບັດງານ ແລະປະຕິບັດຕາມຂັ້ນຕອນທີ່ໄດ້ອະທິບາຍໄວ້ໃນກໍລະນີ 1 ເຖິງກໍລະນີ 5 ຂ້າງເທິງ.
ແກ້ໄຂໂດຍ Lisa
ເວລາປະກາດ: ກັນຍາ-29-2021