

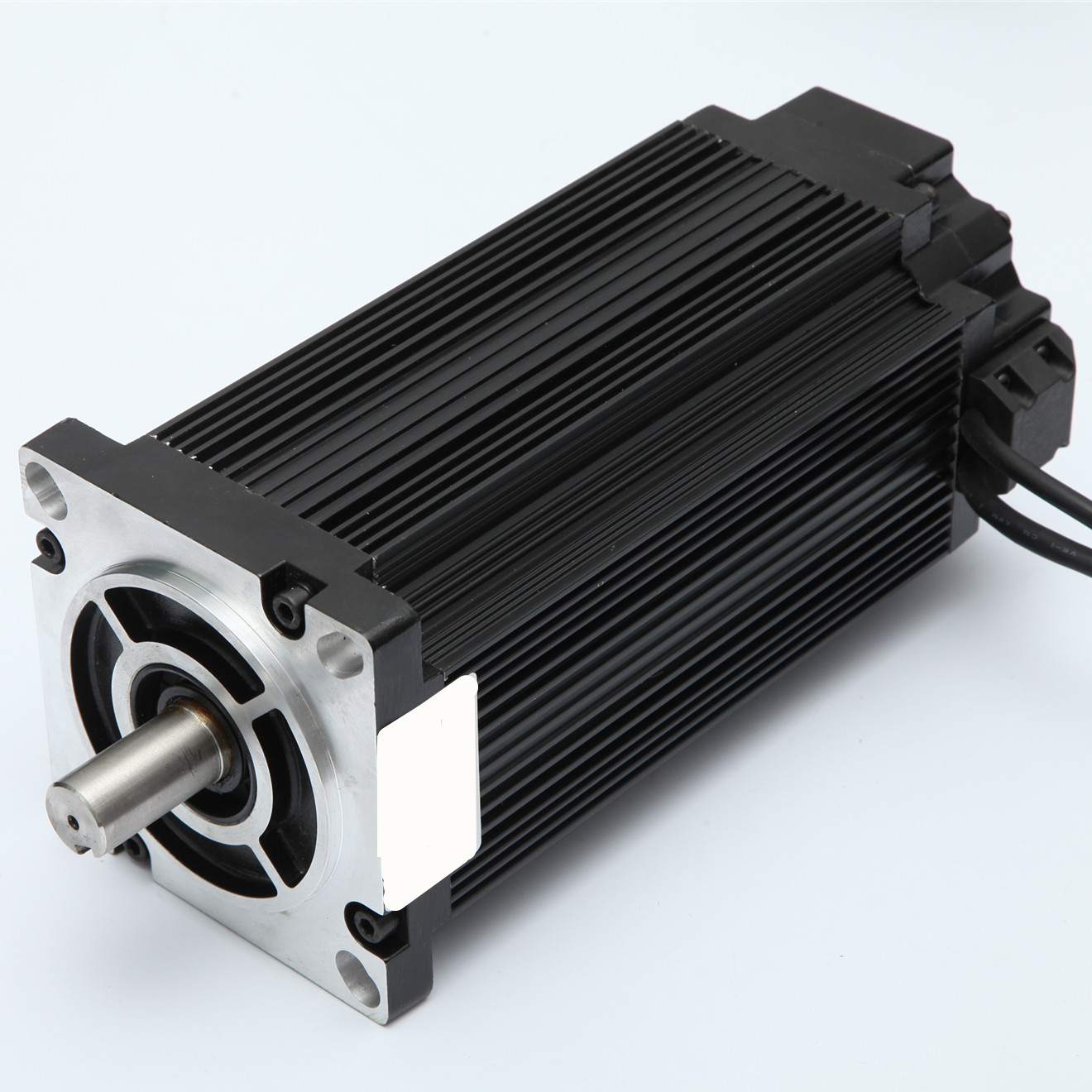
ມໍເຕີວົງປິດ 110mm 220V 20Nm ມໍເຕີ stepper torque ໃຫຍ່ທີ່ມີຈໍສະແດງຜົນນໍາພາ
NEMA42 Easy Servo Series(NEMA42 Closed Loop series)
ຕົວກໍານົດການໄຟຟ້າຂອງມໍເຕີ:
| ໂໝດ | ມຸມ | ປັດຈຸບັນ (A) | ຄວາມຕ້ານທານ (Ω± 10%) | inductance (mH ± 20%) | ແຮງບິດຖື (Nm) | ຄວາມຍາວມໍເຕີ (ມມ) | ຕົວເຂົ້າລະຫັດ ຄວາມລະອຽດ (PPR) | ຄົນຂັບທີ່ໃຊ້ໄດ້ |
| 110HCE12N-B39 | 1.2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1.2° | 4.2 | 1.88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
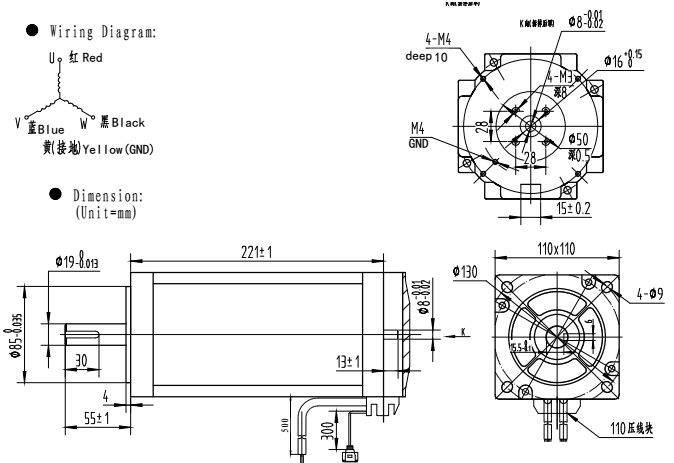
ຂະຫນາດມໍເຕີ: mm
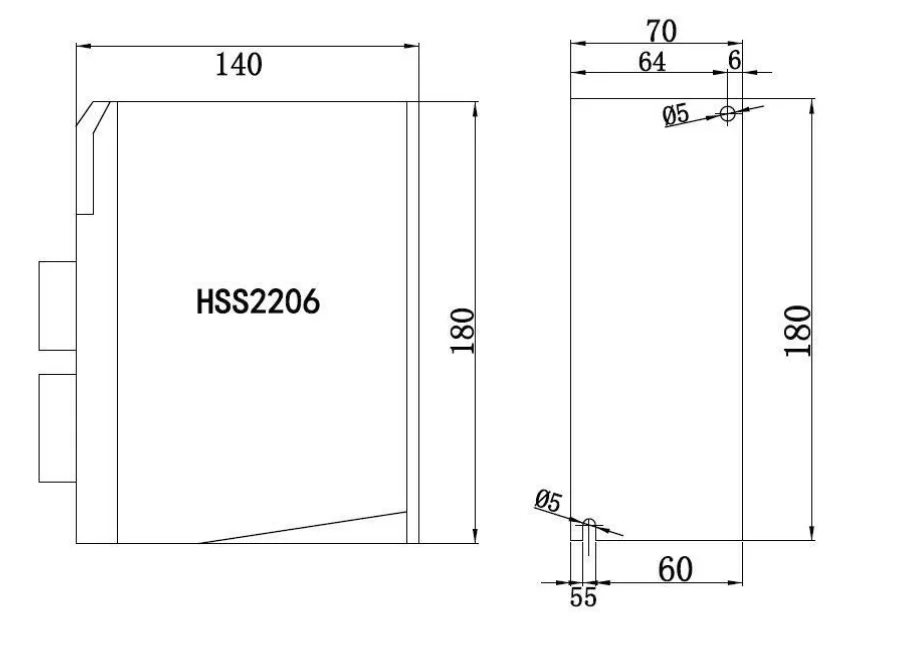
ໄດເວີ 3HSS2260
ຄຸນລັກສະນະ
1, 32-bit DSP ແລະເທກໂນໂລຍີການຄວບຄຸມວົງປິດ vector
2, ໂດຍບໍ່ມີການສູນເສຍຂັ້ນຕອນ, ຄວາມຖືກຕ້ອງສູງໃນຕໍາແຫນ່ງ
3, ປັບປຸງ torque ຜົນຜະລິດ motor ແລະຄວາມໄວການເຮັດວຽກ
4, ເທກໂນໂລຍີການຄວບຄຸມໃນປະຈຸບັນປ່ຽນແປງໄດ້, ຍັບຍັ້ງການເພີ່ມຂຶ້ນອຸນຫະພູມ motor
5, ປັບຕົວເຂົ້າກັບຄວາມຫລາກຫລາຍຂອງເງື່ອນໄຂການໂຫຼດກົນຈັກ (ລວມທັງ pulleys ຕ່ໍາ rigidity), ບໍ່ມີ
ຈໍາເປັນຕ້ອງປັບຕົວກໍານົດການໄດ້ຮັບ
6, ການເຄື່ອນຍ້າຍລຽບແລະເຊື່ອຖືໄດ້, ການສັ່ນສະເທືອນຕ່ໍາ, ການປັບປຸງທີ່ຍິ່ງໃຫຍ່ໃນການເລັ່ງແລະ
ເລັ່ງ
7, ຄວາມສາມາດຂອງສູນຄວາມໄວ static ໂດຍບໍ່ມີການ vibration
8, ປັບຕົວເຂົ້າກັບ 3-phase 86(NEMA34) ແລະ 110(NEMA 42) hybrid servo motor
9, ຄວາມຖີ່ສູງສຸດຂອງກໍາມະຈອນເຕັ້ນຂັ້ນຕອນ 200KHZ
10, ຂັ້ນຕອນຈຸນລະພາກ 400-60000 pulse/rev
11, ຊ່ວງແຮງດັນ AC150-240V
12, ໃນໄລຍະປະຈຸບັນ, ໃນໄລຍະແຮງດັນແລະໃນໄລຍະການປົກປ້ອງຕໍາແຫນ່ງ
13, ຈໍສະແດງຜົນທໍ່ດິຈິຕອນຫົກ, ງ່າຍທີ່ຈະກໍານົດພາລາມິເຕີແລະຕິດຕາມກວດກາການເຮັດວຽກຂອງມໍເຕີ
ລັດ
ການເລືອກ Microstep:
| ລະຫັດ | ຄໍານິຍາມ | ຊ່ວງ | ຄ່າເລີ່ມຕົ້ນ | ຂໍ້ສັງເກດ |
| PA0 | ໝາຍເລກລຸ້ນ | 501 | ຫ້າມດັດແກ້ | |
| PA1 | ການຄວບຄຸມການເລືອກຮູບແບບ | 0~2 | 0 | |
| PA2 | ການເລືອກປະເພດມໍເຕີ | 0~2 | 0 | |
| PA3 | ເປີດການສະແດງຜົນ | 0~7 | 0 | |
| PA4 | ປະຈຸບັນ Loop Kp | 0~1000 | 200 | ຫ້າມດັດແກ້ |
| PA5 | ປະຈຸບັນ Loop Ki | 0~1000 | 300 | ຫ້າມດັດແກ້ |
| PA6 | ຕຳແໜ່ງ Loop Kp | 0~1000 | 300 | |
| PA7 | ການຕັ້ງຄ່າຂັ້ນຕອນຈຸນລະພາກ | 400-60000 | 4000 | |
| PA8 | ຄວາມລະອຽດຕົວເຂົ້າລະຫັດ (1000) | 4000 | ຫ້າມດັດແກ້ | |
| PA9 | ຄວາມລະອຽດຕົວເຂົ້າລະຫັດ (1000) | 40~30000 | 1000 | |
| PA10 | ຖືປະຈຸບັນ | 10~100 | 40 | |
| PA11 | Closed Loop Current | 10~100 | 100 | |
| PA12 | ການຈອງ | |||
| PA13 | ການຈອງ | |||
| PA14 | ເປີດໃຊ້ລະດັບ | 0/1 | 0 | |
| PA15 | ລະດັບປຸກ | 0/1 | 0 | |
| PA16 | ການເລືອກ Pulse Mode | 0/1 | 0 | |
| PA17 | Pulse Edge | 0/1 | 0 | |
| PA18 | ທິດທາງການຫມຸນມໍເຕີ | 0/1 | 0 | |
| PA19 | ຄວາມໄວ JOG | 1~200 | 60 | |
| PA20 | ພາກສ່ວນ PEND Mode | 0/1 | 0 | |
| PA21 | ລະດັບ PEND | 0/1 | 0 |
ຂະໜາດໄດເວີ (ມມ):
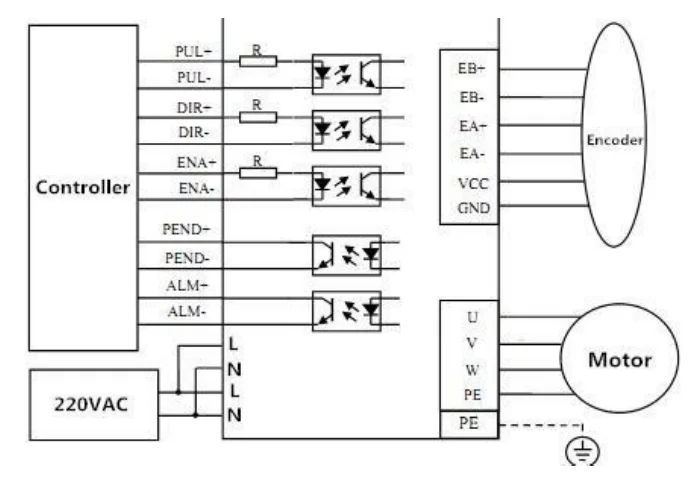
ແຜນຜັງສາຍ:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
